
(916) 227-53-79


СВЕЖИЙ НОМЕР

Новости ИР
- 21-й Ежегодный форум «Лом черных и цветных металлов» — MIR-EXPO 2026 начал свою работу в ПСБ Патриот
- Вопросы поддержки и коммерциализации инноваций в фокусе внимания конференции Эра IP
- Итоги 29-го Московского международного Салона изобретателей и инновационных технологий «Архимед»
- Ученые синтезировали композитный катализатор, который ускоряет превращение CO₂ в метан в 7 раз
- Политехники разрабатывают препарат для очистки Керченского пролива от нефтепродуктов
Наши лауреаты
ЖУРНАЛ «ИЗОБРЕТАТЕЛЬ И РАЦИОНАЛИЗАТОР»
- ВЕРТОЛЕТ ВМЕСТО АВТОМОБИЛЯ
Однако для перехода к повседневному использованию вертолетов в качестве персонального транспортного средства, в том числе в условиях застройки, требуется преодолеть ряд проблем:
- вертолет существенно сложнее в управлении, чем автомобиль;
- вертолет недостаточно безопасен;
- вертолет не может быть припаркован на площадке соизмеримой с автомобильным парковочным местом из-за размеров несущего винта и хвостовой балки с рулевым винтом;
- вертолет гораздо дороже автомобиля, как при покупке, так и в эксплуатации.
На решение перечисленных проблем нацелено изобретение «Компактный вертолет» по заявке № 2016113323, недавно направленной в Роспатент. Основные технические цели, которые необходимо достигнуть, следующие:
- уменьшение диаметра винтов до размеров стандартного парковочного места (2.5х5 м) при грузоподъемности аппарата 3 человека (небольшой размер винтов позволит также использовать защитные элементы вокруг них, обеспечивающие безопасность случайного касания внешних объектов);
- отказ от сложных, дорогих и быстро изнашивающихся механизмов управления шагом винтов;
- наличие автопилота, обеспечивающего стабилизацию вертолета в воздухе, простоту управления, предотвращение опасных режимов и столкновений;
- обеспечение спасения вертолета при технических отказах, в том числе на небольшой высоте.
Достигнуть этих целей предлагается следующими техническими средствами. Необходимо использовать двухвинтовую продольную схему вертолета, см рис.1,
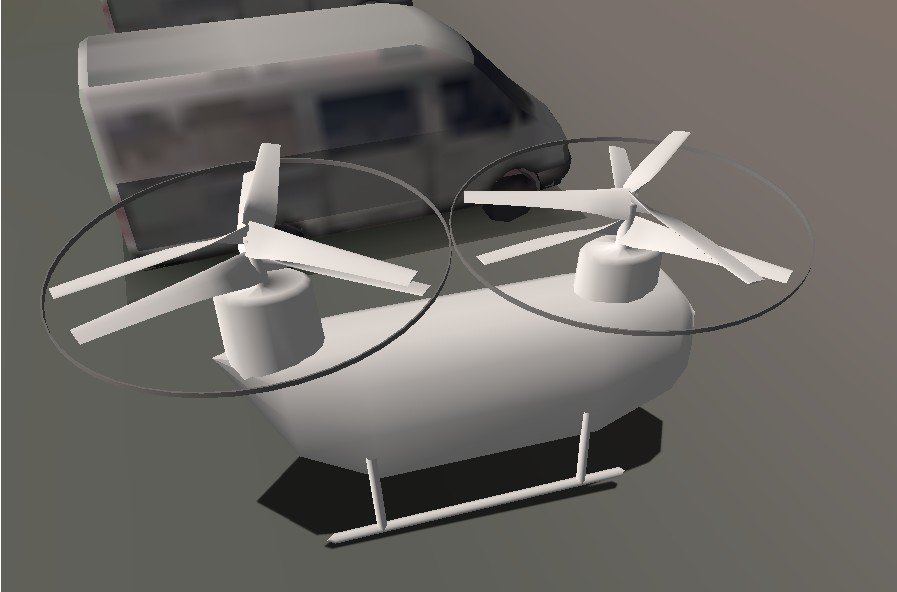 при которой не нужен хвостовой винт, может быть оптимально использована предполагаемая площадь и создана достаточная подъемная сила при использовании доступных двигателей.
при которой не нужен хвостовой винт, может быть оптимально использована предполагаемая площадь и создана достаточная подъемная сила при использовании доступных двигателей.Воздушный винт диаметром 2.3 м с двигателем мощностью 110 л.с. (двухтактный авиационный двигатель такой мощности весит около 50 кг) создает тягу около 320 кг при скорости подъема 1.5 м/с и нулевой горизонтальной скорости. Использование сдвоенных соосных винтов позволяет увеличить тягу на 20%. С другой стороны, экранирование воздушного потока корпусом вертолета может уменьшать тягу, хотя это уменьшение минимизируется за счет эффекта Коанда при надлежащей форме фюзеляжа. Примем, что тяга одного соосного винта составит 350 кг (моделирование и оптимизация с помощью программы X-Plane подтверждает такую оценку). Тогда двухвинтовой двухмоторный вертолет с габаритами 5х2.5 м по винтам, окруженным защитой, может иметь массу до 700 кг, что представляется достаточным для полета 3 пассажиров. Немаловажно отметить, что воздушные винты такого диаметра попадают в категорию самолетных с соответствующей отработанной конструкцией, технологией производства и невысокой стоимостью. Естественно, об использовании вертолетных автоматов перекоса, управляющих шагом винтов, не может быть речи. Необходима другая система управления полетом. В силу малого диаметра и фиксированного шага винтов невозможным оказывается использование режима авторотации для спасения вертолета при отказе двигателя. Использование двух независимых двигателей без возможности продолжения полета только на одном из них увеличивает вероятность аварии в сравнении с одномоторным аппаратом, поэтому необходима конструкция, которая позволяла бы осуществлять управляемую посадку, используя только один из двух двигателей, увеличивая тем самым отказоустойчивость и безопасность за счет дублирования. Рассмотрим, как можно решить эти проблемы.
Управление высотой полета не требует быстрой реакции системы на управляющее воздействие, поэтому его можно осуществлять с помощью изменения мощности двигателей. Движение вперед или назад и управление по тангажу предлагается осуществлять путем наклона несущих винтов вперед или назад относительно корпуса вертолета. На рис.2
 (Вид вертолета сбоку со схемой действия сил при продольном наклоне несущих винтов. 1 – корпус вертолета, 2 и 3 – передний и задний винты, 4 – двигатели с редукторами, 5 – линия действия силы тяги винтов, 6 – центр масс вертолета) показан пример действия сил при наклоне несущих винтов вперед. Такой наклон вызывает появление компоненты силы тяги, направленной вперед и вызывающей соответствующее движение вертолета. Кроме того происходит наклон линии силы тяги винтов и ее смещение относительно центра масс вертолета. В результате возникает крутящий момент, который вызывает наклон вертолета вперед, осуществляя, таким образом, управление по тангажу. При этом важно, что центр, относительно которого осуществляется наклон винта, находится выше центра масс вертолета. Движение влево и вправо и управление вертолетом по крену осуществляется аналогичным образом с помощью поперечного наклона обоих несущих винтов в соответствующую сторону. При наклоне переднего и заднего винтов в противоположные стороны возникает пара горизонтальных сил, стремящихся повернуть вертолет вокруг вертикальной оси, осуществляя таким образом управление по курсу. Во избежание усложнения системы трансмиссии наклон винтов необходимо осуществлять вместе с соответствующими двигателями и редукторами. Пример реализации механизма наклона несущих винтов в продольном и поперечном направлении с использованием электрических сервомоторов показан на рис.3 (1 – корпус вертолета; 2 – стойки; 3 – продольно наклоняемая балка; 4 – наклоняемая в двух направлениях платформа, на которой крепятся двигатель и винты; 5 – сервомоторы; 6 – зубчатые сектора).
(Вид вертолета сбоку со схемой действия сил при продольном наклоне несущих винтов. 1 – корпус вертолета, 2 и 3 – передний и задний винты, 4 – двигатели с редукторами, 5 – линия действия силы тяги винтов, 6 – центр масс вертолета) показан пример действия сил при наклоне несущих винтов вперед. Такой наклон вызывает появление компоненты силы тяги, направленной вперед и вызывающей соответствующее движение вертолета. Кроме того происходит наклон линии силы тяги винтов и ее смещение относительно центра масс вертолета. В результате возникает крутящий момент, который вызывает наклон вертолета вперед, осуществляя, таким образом, управление по тангажу. При этом важно, что центр, относительно которого осуществляется наклон винта, находится выше центра масс вертолета. Движение влево и вправо и управление вертолетом по крену осуществляется аналогичным образом с помощью поперечного наклона обоих несущих винтов в соответствующую сторону. При наклоне переднего и заднего винтов в противоположные стороны возникает пара горизонтальных сил, стремящихся повернуть вертолет вокруг вертикальной оси, осуществляя таким образом управление по курсу. Во избежание усложнения системы трансмиссии наклон винтов необходимо осуществлять вместе с соответствующими двигателями и редукторами. Пример реализации механизма наклона несущих винтов в продольном и поперечном направлении с использованием электрических сервомоторов показан на рис.3 (1 – корпус вертолета; 2 – стойки; 3 – продольно наклоняемая балка; 4 – наклоняемая в двух направлениях платформа, на которой крепятся двигатель и винты; 5 – сервомоторы; 6 – зубчатые сектора).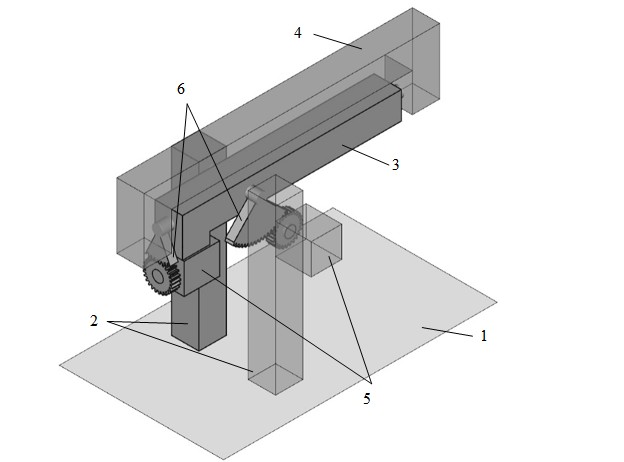
При наклоне вращающегося одиночного (несоосного) винта возникает гироскопический момент на ортогональной оси управления, что приводит к необходимости использования в управлении сервомоторов со значительным запасом по вращающему моменту. В соосных противоположно вращающихся винтах гироскопические моменты взаимно скомпенсированы, что позволяет использовать сервоприводы небольшой мощности.
Для спасения вертолета при отказе одного из двигателей можно наклонить работающий винт (для примера, передний) в такое новое среднее положение, при котором линия действия его силы тяги пройдет вблизи центра масс вертолета, см. рис.4 (Вид вертолета сбоку в режиме вынужденной посадки при отказе привода заднего несущего винта. 1 – корпус вертолета, 2 и 3 – передний и задний винты, 4 – двигатели с редукторами, 5 – линия действия силы тяги работающего винта, 6 – центр масс вертолета).
 Благодаря тому, что винт выполнен соосным, его реактивный вращающий момент скомпенсирован, и вертолет не приходит во вращение при отказе заднего винта. Наклоны переднего винта относительно нового среднего положения обеспечивают возможность управления вертолетом по тангажу (горизонтальной скорости полета) и курсу, а при наличии необходимого запаса мощности двигателя сохраняется и возможность управления высотой. При недостаточном запасе мощности управление скоростью снижения осуществляют путем изменения горизонтальной скорости вертолета, приводящего к изменению подъемной силы работающего винта. Двигатель при этом работает на максимальной мощности. Посадку в этом случае осуществляют с необходимой горизонтальной скоростью («по-самолетному»). Таким образом наличие двух независимых наклоняемых двигателей и винтов обеспечивает дублирование, повышающее безопасность полетов, в том числе и при отказах на небольшой высоте.
Благодаря тому, что винт выполнен соосным, его реактивный вращающий момент скомпенсирован, и вертолет не приходит во вращение при отказе заднего винта. Наклоны переднего винта относительно нового среднего положения обеспечивают возможность управления вертолетом по тангажу (горизонтальной скорости полета) и курсу, а при наличии необходимого запаса мощности двигателя сохраняется и возможность управления высотой. При недостаточном запасе мощности управление скоростью снижения осуществляют путем изменения горизонтальной скорости вертолета, приводящего к изменению подъемной силы работающего винта. Двигатель при этом работает на максимальной мощности. Посадку в этом случае осуществляют с необходимой горизонтальной скоростью («по-самолетному»). Таким образом наличие двух независимых наклоняемых двигателей и винтов обеспечивает дублирование, повышающее безопасность полетов, в том числе и при отказах на небольшой высоте.Для спасения вертолета при отказе обоих двигателей необходимо использовать баллистическую парашютную систему, размещаемую на корпусе между передним и задним винтами. Дополнительным средством, повышающим безопасность полетов, должна стать телескопическая конструкция стоек шасси, обеспечивающая гашение энергии удара. Такая конструкция позволит обезопасить пассажиров в случае падения вертолета со сверхмалой высоты, когда другие системы спасения не успевают вступить в действие, а также уменьшить площадь спасательного парашюта, ускорив тем самым его раскрытие.
Автопилот, обеспечивающий стабилизацию полета без участия пилота, предотвращение опасных режимов, а также возможность автономного полета по заданному маршруту, включая автоматические взлет и посадку, может быть реализован на основе существующего открытого программного и аппаратного обеспечения для беспилотных аппаратов, такого как PX4 / Pixhawk. Уже сейчас такие системы поддерживают большое количество датчиков и режимов управления полетом, однако потребуется их доработка с целью обеспечения соответствия требованиям, предъявляемым к пилотируемым летательным аппаратам, и добавления новых функций, таких как автоматическое предотвращение столкновений и безопасная вынужденная посадка при отказе одного из двигателей.
Работоспособность предлагаемых технических решений проверена на упрощенной физической модели вертолета масштаба 1:10 с одинарными несущими винтами и электрическим приводом. На рис.5
 приведена фотография модели в полете. Проведено также полномасштабное компьютерное моделирование с помощью симулятора X-Plane, позволяющего вычислять аэродинамические силы, действующие на летательный аппарат, и моделировать его динамику, решая соответствующие уравнения движения. Как физическая, так и численная модели продемонстрировали работоспособность предложенных технических решений.
приведена фотография модели в полете. Проведено также полномасштабное компьютерное моделирование с помощью симулятора X-Plane, позволяющего вычислять аэродинамические силы, действующие на летательный аппарат, и моделировать его динамику, решая соответствующие уравнения движения. Как физическая, так и численная модели продемонстрировали работоспособность предложенных технических решений.Силами небольшой группы энтузиастов начато строительство полнофункциональной модели вертолета в масштабе 1:5. Такой беспилотный летательный аппарат может найти и самостоятельное применение, поскольку используемые в нем двигатели внутреннего сгорания обеспечат большую длительность и дальность автономного полета в сочетании с компактными размерами, безопасностью и достаточно большой грузоподъемностью (взлетный вес около 25 кг). После проработки основных узлов и технических решений на такой модели планируется начать постройку полномасштабного прототипа.
А.Корженевский, д.ф.-м.н.,
avklab@gmail.com
Наши партнеры


